编码器是如何实现定位功能的?
编码器,作为工业控制中的关键部件,主要负责测量和报告电机轴或负载的当前位置。然而,
旋转编码器本身并不直接执行定位操作,而是需要配合数控系统(如PLC等控制器)以及伺服或步进电机来实现精确定位。编码器可以比作人的眼睛,它知道电机轴或负载当前所处的位置。

图为与测量轮配合测速使用的亨士乐增量编码器照片
编码器的工作原理
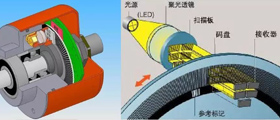
以光电编码器为例,它通常包含一个薄而轻的圆盘(码盘),该圆盘上通过精密仪器刻有许多细小的缝隙。这些缝隙将360度圆周细分为多个等份,比如1024组,这样每组之间的角度差就是360/1024度=0.3515625度。
在码盘的一面安装有一个精密的发光源,而在另一面则配置有接收器,如光敏电阻等元件,并配有放大和整形电路。当码盘转动时,有缝隙的地方会让光线通过,此时接收器会瞬间接收到光脉冲。这些光脉冲经过电路处理后,转化为电脉冲信号输出。这样,当码盘旋转一周时,会对应输出1024个脉冲。通过读取这些脉冲的个数,就可以确定码盘(进而电机轴)当前所处的位置。
编码器的应用
电机轴位置检测:将编码器安装在电机轴上,由于电机轴与码盘是刚性连接的,因此两者位置一一对应。通过读取编码器输出的脉冲数,就可以知道电机轴的当前位置。
负载位置检测:电机轴通常会通过同步带、齿轮、链条等带动负载(如丝杆)运动。根据特定的电子齿轮比关系(即电机转一圈,丝杆前进的毫米数),通过读取编码器输出的脉冲数,可以反推出当前丝杆的位置。
增量型编码器与绝对值编码器
增量型编码器:为了解决编码器无限旋转导致角度无穷大的问题,设计了增量型编码器。它会在每转一圈时输出三组信号ABZ。其中,AB相脉冲对应一圈内的圆周角度,且两种脉冲处于正交状态。通过判断AB相脉冲的上升沿和下降沿的先后顺序,可以确定编码器的旋转方向。Z相脉冲作为基准点,编码器每转一圈只输出一个Z相脉冲。这样,即使系统断电重新上电,只要能找到这个基准点,就可以确定丝杆的初始位置。
绝对值编码器:对于只需要转一圈或几圈的应用场景,可以使用绝对值编码器。绝对值编码器具有更高的细分精度,如13位编码器可以输出2^13个脉冲来对应360度。这种编码器在断电后无需重新调整零位,因为脉冲数与角度之间存在一一对应的关系。对于需要转多圈但圈数不多的应用,绝对值编码器同样适用。
磁电编码器
除了光电编码器外,还有磁电编码器。它通过在码盘上加工多个南北间隔的小磁铁,并使用霍尔元件读取小磁铁信号来输出电脉冲信号。磁电编码器价格较为便宜且可靠性高,但精度稍逊于光电编码器。
了解更多
编码器相关知识,敬请关注 网站。公司技术团队为您免费提供编码器的选型、安装、调试、保养等技术指导服务,尽量避免企业因为编码器技术人员的短缺带来的损失,采取拉线上+拉线下服务的服务形式,帮助企业解决技术难题。


 在线QQ
在线QQ 186-2947-6872
186-2947-6872 在线咨询
在线咨询

 info@motion-control.com.cn
info@motion-control.com.cn