为何机器人关节模组倾向于采用双
编码器设计?
关节模组,作为机器人关节控制系统的核心部件,对机器人的运动控制和动作精确度起着决定性作用。为了确保精确的运动,位置反馈和误差校正是不可或缺的环节,而双编码器设计正是针对这一需求而诞生的。

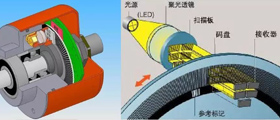
图为机器人关节内部结构照片
双编码器设计由绝对值编码器和增量编码器两部分组成。绝对值编码器负责提供精确的位置信息,确保机器人关节能够准确到达指定位置;而增量编码器则负责实时监测并校正运动过程中的误差,确保每一步都精准无误。这两者的协同作用,使得关节模组的精度和可靠性得到了显著提升,从而保证了机器人在执行复杂任务时的准确性。
双编码器设计的优势主要体现在以下几个方面:
精度与稳定性的双重提升:
双编码器系统结合了绝对值编码器的高精度位置反馈和增量编码器的实时误差校正功能,使得机器人在运动过程中能够始终保持高度的精确性和稳定性。即使在动态复杂的环境中,也能确保动作的精准控制。
可靠性的显著增强:
双编码器设计不仅提高了精度,还显著增强了机器人的可靠性。当其中一个编码器出现故障时,另一个编码器能够迅速检测并接管工作,确保关节模组能够继续正常稳定运行,从而避免了因单一编码器故障而导致的机器人停机或动作失误。
抗干扰能力的有效提升:
在复杂环境中,外界干扰可能会对机器人的稳定性产生影响。而双编码器设计通过两者的协同工作,能够有效减弱这些干扰对关节运动的影响,确保机器人能够稳定运行并保持高效性能。
关节模组采用双编码器设计的主要目的是为了实现精准的位置反馈和误差校正,从而提升机器人的精度、稳定性和抗干扰能力。这种设计不仅让机器人在精密操作中表现出色,还为关节模组提供了长期的可靠性保障。因此,双编码器设计已经成为先进机器人关节模组的标配,为机器人在各种复杂应用场景中发挥最佳性能提供了有力支持。
了解更多
机器人编码器相关知识,敬请关注 网站。公司技术团队为您免费提供编码器的选型、安装、调试、保养等技术指导服务,尽量避免企业因为编码器技术人员的短缺带来的损失,采取拉线上+拉线下服务的服务形式,帮助企业解决技术难题。


 在线QQ
在线QQ 186-2947-6872
186-2947-6872 在线咨询
在线咨询

 info@motion-control.com.cn
info@motion-control.com.cn